Changed Staror
![]()
Partitioned Stator Switched Flux Machine: Novel Winding Configurations
ane
Electrical Applied science Section, Higher of Applied science, Najran University Kingdom of saudi arabia, Najran 61441, Saudi Arabia
2
Section of Electrical Engineering, City Academy of Science and Data Technology, Peshawar 25000, Khyber Pakhtunkhwa, Pakistan
three
Faculty of Electric Engineering, Abbottabad Campus, COMSATS Academy Islamabad, Abbottabad 22060, Islamic republic of pakistan
four
Department of Automatic, Control and Robotics, AGH University of Science and Technology, 30-059 Cracow, Poland
*
Authors to whom correspondence should be addressed.
Received: 24 June 2020 / Revised: 17 August 2020 / Accepted: 19 August 2020 / Published: 22 August 2020
Abstract
Torque density is one of the major limiting factors in auto design. In this paper, nosotros advise the hybrid excited partitioned stator switched flux machine3 (HE-PSSFM3). In HE-PSSFM3, armature winding is positioned on the outer stator whereas the permanent magnet (PM) and field winding are placed at the inner stator, while the rotor is free from excitation sources and armature winding. Moreover, concentrated field winding is replaced by toroidal winding. The power splitting ratio between two stators/rotor pole combinations is analytically optimized and are validated through genetic algorithm (GA) in club to enhance average torque and flux regulation capability. The electromagnetic characteristics of the improved and initial design are evaluated and compared with existing designs, i.eastward., HE-PSSFM1 and HE-PSSFM2. The proposed HE-PSSFM3 has achieved high average torque, i.e., two.0015 Nm, at aforementioned armature and field electric current densities of 5 A/mm
. The results evidence that the average torques of the proposed design are 35% and 15% greater than HE-PSSFM1 and HE-PSSFM2, respectively. Furthermore, the assay of various parameters such as flux linkage, flux regulation, electromagnetic performances, cogging torque, dorsum EMF, electromagnetic torque, and torque ripples are investigated using two dimensional (2nd) finite chemical element analysis (FEA). Moreover, the simulation results of the proposed design are validated through GA and belittling modeling.
1. Introduction
Permanent magnet (PM) machines are distinguished by their improved efficiency and torque density [one,ii]. Many researchers exploited the flux weakening capabilities of induction auto (IM) and their applications in variable speed electrical vehicles, elevators, etc., [2]. In [3], wide constant speed ability range of PM machine results from the flux weakening through injection of negative direct axis armature electric current is discussed. The applications of such blazon of interior permanent magnet (IPM) machines are very limited for variable speed systems due to their constant generated field. The hybrid excited (HE) machines utilise flux from both PM and field excitation gyre. The high torque density, efficiency and wound field controllability of these machines are discussed in [4]. In [v], the ratio betwixt PM flux and field winding flux equally an boosted caste of freedom is achieved. The output torque and high-ability factor are maintained through the injection of a positive straight current in [6]. The HE machines ameliorate the regulation of flux and inherits the benefits of PM machines [7]. The sliding contacts degrade the system thus effecting the reliability of system. In [8], the authors discuss drawbacks of machines having brushes and slip rings and thus, stator lodged field excited windings to accost this issue. The partial slot hybrid excited switched flux machine (HESFM) improves the flux weakening capabilities and are discussed in [ix]. The armature electric current in PMs causes irreversible demagnetization. The directly axis and quadrature axis currents are separated to weaken the flux through armature currents. The chapters of armature current due to direct axis current is increased thus reducing the quadrature axis current and sacrificing the power factor hence torque capabilities [ix].
HESFMs are more attractive in the research community due to; (a) high speed and greater torque density (b) constant power at wide range of speed and (c) fault tolerant capability [10,11,12]. In literature, diverse designs of HESFMs are classified as parallel and series flux paths [xiii,14,fifteen,sixteen,17]. PM machines take drawbacks of saturation and mechanical limitations. These problems are addressed by HEFSMs while used for high-speed applications, equally in that location is no winding on rotor [18]. When a magnet is utilized in electric auto to pull ferromagnetic bits of metallic out of a mixed organization of materials, frictional and touch on effects that necessarily occur increase surface temperatures leading to increases in thermal radiation. This increases energy dispersion, and energy dispersion is a sure indication of increasing entropy. Evolution of new rare-globe free permanent magnets has non been achieved. Almost of the high operation permanent magnet requires a combinational approach to alloy pattern and Dysprosium is ane of the element to class neodymium-iron-boron (Neo) permanent magnets. Hence intense inquiry is required to develop a highly-efficient permanent magnet based on the concept of highly entropy alloys (HEAs). As limited research is bachelor in this expanse and HEAs permanent magnet are not utilized yet in the electric motorcar, reduction of rare-earth permanent magnet book in electric motorcar is investigated from the terminal decade and performance of various topologies are examined. Space utilization is the major limitation of the HEFSMs. In [19], the authors investigate the hybrid excited partitioned stator switched flux machine-1 (HE-PSSFM1) where the PM book is assumed 2500 mm
at alternating stator pole, hence, it makes the machine cost effective [19]. Nevertheless, due to less number of PMs the functioning in terms of Ability/torque density of the HE-PSSFM1 is nonetheless limited. To further ameliorate the performance, the authors in [20] consider HE-PSSFM2 while increasing the volume of PM to 5000 mm
as compared with HE-PSSFM1. With the increase in PM volume of HE-PSSFM2, the ability/torque density increases, hence the cost also rises. In contrast to HE-PSSFM1 and HE-PSSFM2, a car is required to keep the trade-off between the price and torque density. In this paper, nosotros propose a novel machine design named as HE-PSSFM3. In this paper curt end winding and toroidal winding are used interchangeable, where the less number of PMs with toroidal winding is considered. In HE-PSSFM1 and HE-PSSFM2, the authors consider concentrated field winding with 6 and 12 PMs. In our proposed pattern i.e., HE-PSSFM3, with toroidal winding (short end winding) having half-dozen PMs is considered. The results indicate torque density of the proposed model is 35% and fifteen% higher than HE-PSSFM1 and HE-PSSFM2, respectively. Additionally, the analyses similar flux linkage, flux regulation, electromagnetic performances, cogging-torque, back EMF, electromagnetic torque and torque ripples are investigated using 2D finite element analysis (FEA).
2. Design of Different Winding Configurations
Figure 1 shows different winding configurations, (a) inner–outer, (b) outer and (c) inner toroidal winding arrangements. The toroidal winding has short end connection. The advantages of toroidal winding are to reduce copper losses, increment the efficiency, reduce volume and weight of the auto and is applicable for high-speed applications [21]. Performance analysis is carried out in this section in terms of electromagnetic torque, flux linkage and cogging torque of toroidal winding and is summarized in Table 1. The inner toroidal winding of flux linkage is 59% and 65% greater than outer and inner–outer toroidal windings, respectively. Similarly, the cogging torque of inner toroidal winding is 35% and 9% less than the outer and inner–outer toroidal winding. Moreover, the average torque of inner toroidal winding is 56% and 80% higher than outer and inner–outer toroidal winding, respectively.
3. Operation Principle and Machine Topology
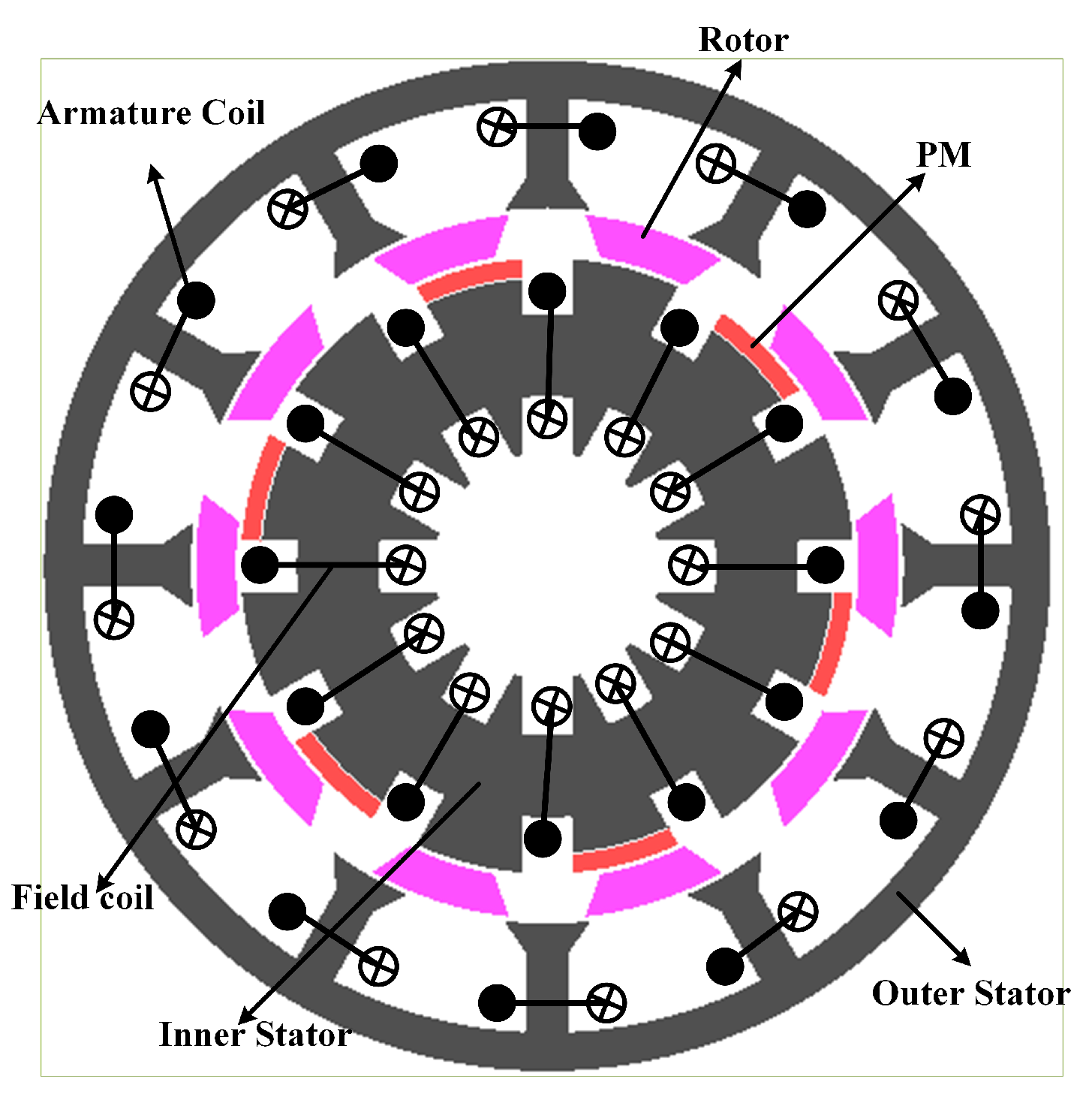
Figure 2 illustrates the comparison of proposed HE-PSSFM3 with the HE-PSSFM1 [19] and HE-PSSFM2 [20]. Effigy 2c depicts the HE-PSSFM3 with ten-Poles/12-Slots, that comprises of inner stator accommodating the toroidal field windings and PM, a piece of iron that is sandwiched between outer and inner stator and outer stator housing the armature windings, where the field excited ringlet (FEC) and armature windings are not-overlapping. The arrangement of armature coils is washed in concentrated manner, while the FEC has toroidal winding configuration thus increasing the regulation of torque and flux density capability. The inner stator pole tip carries radially magnetized PMs and the identical slot number of outer and inner stator pole is used.
The operating principles of HE-PSSFM2 and HEPSSFM3 are the same. The rotor electrical position
is given equally [20], where
,
are the rotor pole number and rotor mechanical position. In the proposed HE-PSSFM3 design, in Effigy 2c the coils 1, iv, 7 and 10 are combined in a forward management. Effigy iii shows the open excursion flux distribution of HE-PSSFM3 at four different bending rotor positions. Figure 4 illustrates phase A flux linkage, which cutting the peak point of flux at
and
and zero flux at
and
. In improver, the combined whorl 1 and 4 at no-load analysis is shown in Figure 4 and the result is near to pure sinusoidal. The result describes odd hormonic emptying in the car. The design parameters are summarized in Tabular array 2. Flux enhancing and flux weakening operations and regulating flux operation are specified principles of proposed blueprint every bit shown in Figure 5. PMs and field excitation scroll generated flux are added at the same time in the air-gap. In Figure vi, we notice the condition of flux enhancing and flux weakening at electrical degree,
=
rotor position. Cooling jacket concept is proposed for thermal management as shown in Figure 6c. The iii types of techniques are radiation, convection and conduction. In this design, water is selected as the cooling medium. The temperature of water cannot increase because water enters from one side and out from the other side. A major part of heat is captivated by the coolant medium and some of the rut volition flow through convection to air [22]. H2o jacket cooling organization is available for a maximum electric current density of 30 A/mm
. Figure 7a shows the flux linkage at no-load assay by applying v A/mm
current density. Figure 7b shows the flux density plots at different rotor positions.
4. Electromagnetic Performance
Figure viii illustrates the induced-voltage of proposed design and existing designs HE-PSSFM2 and HE-PSSFM1 at a speed of 400 rpm at the no-load status. The profile of back EMF maximum amplitude of is lower than existing pattern. The back EMF contour of HE-PSSFM3 is nearly sinusoidal, which has negligible odd harmonics every bit depicted in Figure 8.
4.ane. Cogging Torque
Cogging torque is defined every bit unwanted phenomena in electrical machine design. The Figure ix illustrate cogging torque of the proposed design is 52% and 25% greater than HE-PSSFM2 and HE-PSSFM1 respectively. By applying the genetic algorithm (GA) optimization technique, we minimize the acme points of cogging torque and heighten the average torque. Furthermore, to reduce by adjusting inner and outer pole arcs significantly reduced cogging torque, and has negligible furnishings on average torque.
4.two. Flux Regulation
In this section, flux regulation is discussed which is a typical property of hybrid exited machines. Figure 10 shows the profile of back EMF with various field electric current density and abiding speed at 400 rev/min. The armature current density is represented with Js = v and Js = −five and Je of 5 A/mm
, with both positive and negative polarities. The back EMF profile of HE-PSSFM3 has larger variation range than existing the design because of the loftier surface area field coil slots. In Figure 11, the variation ranges of the proposed and existing designs are compared. Figure 11 shows that HE-PSSFM2 has higher variation range than HE-PSSFM1 and HE-PSSFM3 designs.
4.3. Torque
Figure 12 shows the proposed design has an instantaneous torque at maximum current density 5 A/mm
. The proposed design has a higher average torque and less torque ripple than existing designs. However, generating high average torque is due to high slot area of armature and field windings and better space utilization of the machine. From Figure 12, it is observed that the maximum occurred at 0
and that shows it had insignificant reluctance on torque. Table 3 summaries average torque at different field current densities.
The conventional designs are lower than the proposed blueprint at PMs excitation and field enhancing conditions. The field current effect on average torque (
) is critically observed. Figure 12 shows un-optimized torque of the proposed design and optimized torque of the existing pattern. The proposed design is less than HE-PSSFM2 and greater than HE-PSSFM1. The proposed torque is further improved by applying GA technique.
five. Optimization Process
five.i. Analytical Design Procedure of Power Splitting Ratio for Torque Maximization
Since there are various parameters in the HE-PSSFM3 machine, it is desirable to develop a uncomplicated analytical design procedure to facilitate the parametric optimization.
The ability splitting between 2 split stators should be considered in advance. Figure 13 illustrates the geometric parameter of the proposed design. In reality, magnetic-thickness effects inner-slot width and therefore it is important for balancing the electric and magnetic loading considering the excitation sources are housed in the inner-stator.
5.2. Optimal Electrical Loading
The dominant sensitive parameter, effective split up ratio (
) is define equally
Belittling method is implemented to aid the optimization of
. Every bit a outcome, co-ordinate to [22], the average electromagnetic ability delivered past the interaction between two sets of winding, is given by
where,
and
are the back EMF and phase electric current value of the inner and outer winding,
are the diameter inner/outer air-gap,
is the axial length,
is the efficiency,
is the optimal flux density in air-gap and
are the inner/outer electrical loading. Hence, the total power can be expressed equally
The electric loading of inner and outer air-gaps, Ai and Ao, respectively are shown as
Hither,
,
,
,
and
are the slot-packing factor, the inner current density, the outer current density, number of outer stator slots and number of outer stator slots, respectively. The turn per stage in outer and inner winding can be calculated by
Past substituting (3) and (four) into (half dozen) and (seven), it yields
The full copper loss is constrained in this case during the optimization, and hence the following constraint can be obtained
Therefore, the total power extremism issues are equalized as the maximization of the term
according to the Cauchy inequality theorem [23].
Based on Equation (13), the maximum torque density tin be obtained when the following relation is satisfied
In this example, the ability divide ratio can be calculated as
Figure xiv shows the comparison of FEA and analytical modeling of average torque with respect to split up ratio. Information technology is observed that FEA and analytical results are approximately the same and 0.86 is the maximum split ratio and error is less than ii.3%. The analytical technique fails to account terminate outcome, non-linear magnetic saturation and flux linkage.
5.3. Genetic Algorithm
GA optimization technique is practical to HE-PSSFM3, which increases the performance in terms of flux linkage and reduced cogging torque. The HE-PSSFM3 has achieved amend operation than existing HE-PSSFM1 and HE-PSSFM2. Figure 15 shows the geometric parameter/optimized design of the proposed machine. It should be emphasized that there is a trade off among the cogging torque, flux linkage and electromagnetic torque.
Figure sixteen shows the 3D sketch and mechanical sketch of the HE-PSSFM3. The characteristics of the proposed machine are enhanced by global optimization of rotor and PM. Tabular array 4 summarizes the initial and final design parameters. After global optimization, the electromagnetic flux linkage is 33% greater than initial designs, equally depicted in Figure 17a, similarly, the flux linkages of 2nd and 3D are shown in Figure 17b. Moreover, the electromagnetic torque is 36% greater than the initial pattern and is depicted in Figure eighteen. Similarly, the pinnacle-to-summit cogging torque reduced up-to 76.8% as is illustrated in Figure 19. Copper consumption is the primal factor to be considered while designing the machine. Higher copper consumption causes three chief drawbacks in the design. Firstly, big copper losses, secondly, high price of machine and thirdly, depression efficiency of car. The proposed HE-PSSFM3 with not-overlapped and toroidal windings system has less copper consumption and high efficiency. HE-PSSFM3 copper losses can exist calculated using Equation (16).
In Equation (16), R and I are the root mean foursquare current and winding resistance, respectively, and subscripts "e" and "a" correspond FEC and armature, respectively. Figure 20 illustrates copper losses verses armature current density of HE-PSSFM3 and maximum copper loss is 216.half dozen Watt at 15 A/mm
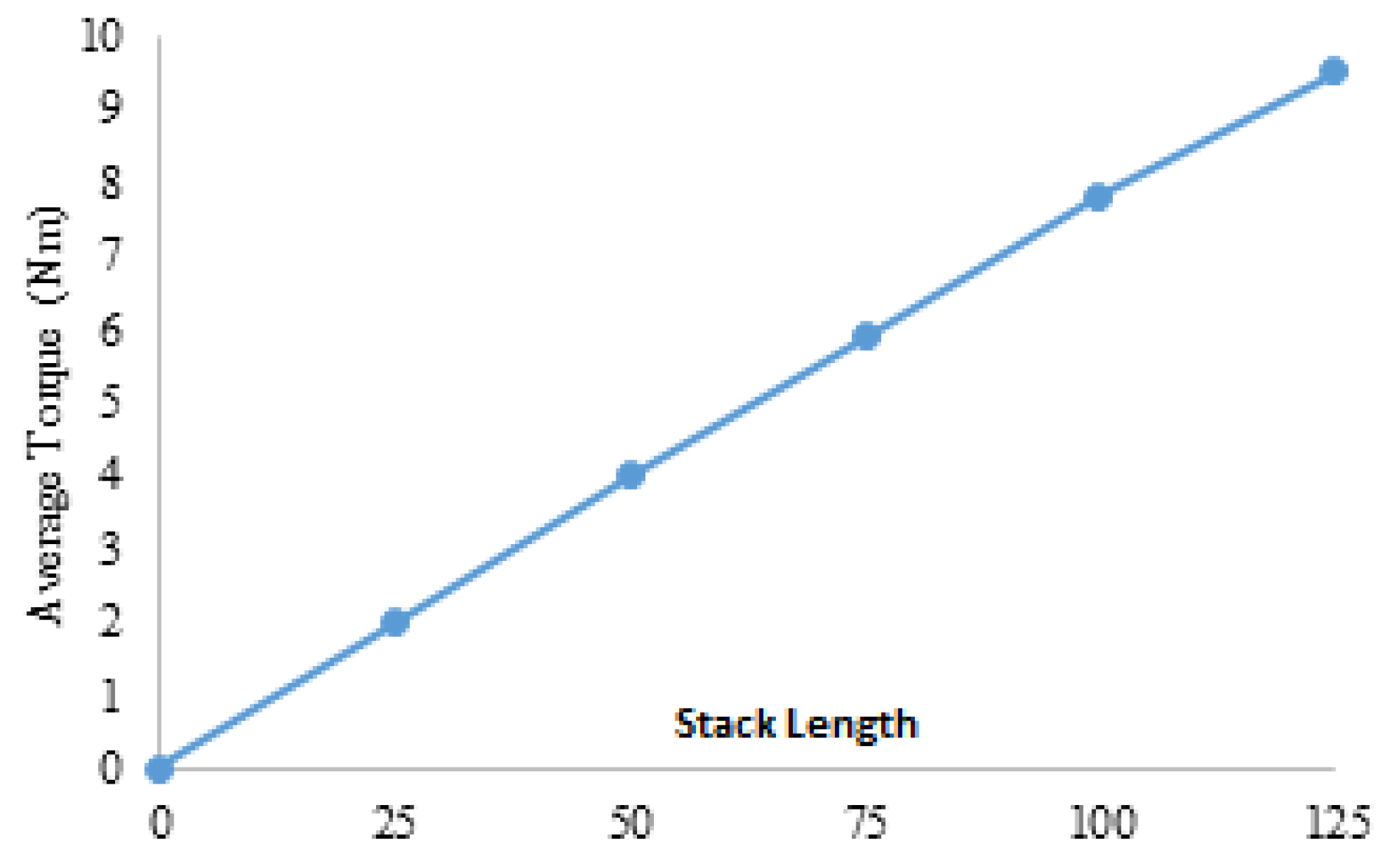
. Copper loss remains constant earlier and later on optimization process because slot area united nations-inverse during optimization. Figure 21 shows the stack length verses average torque at maximum armature and field current density and with constant speed. The average torque is approximately linearly increasing with increasing stack length.
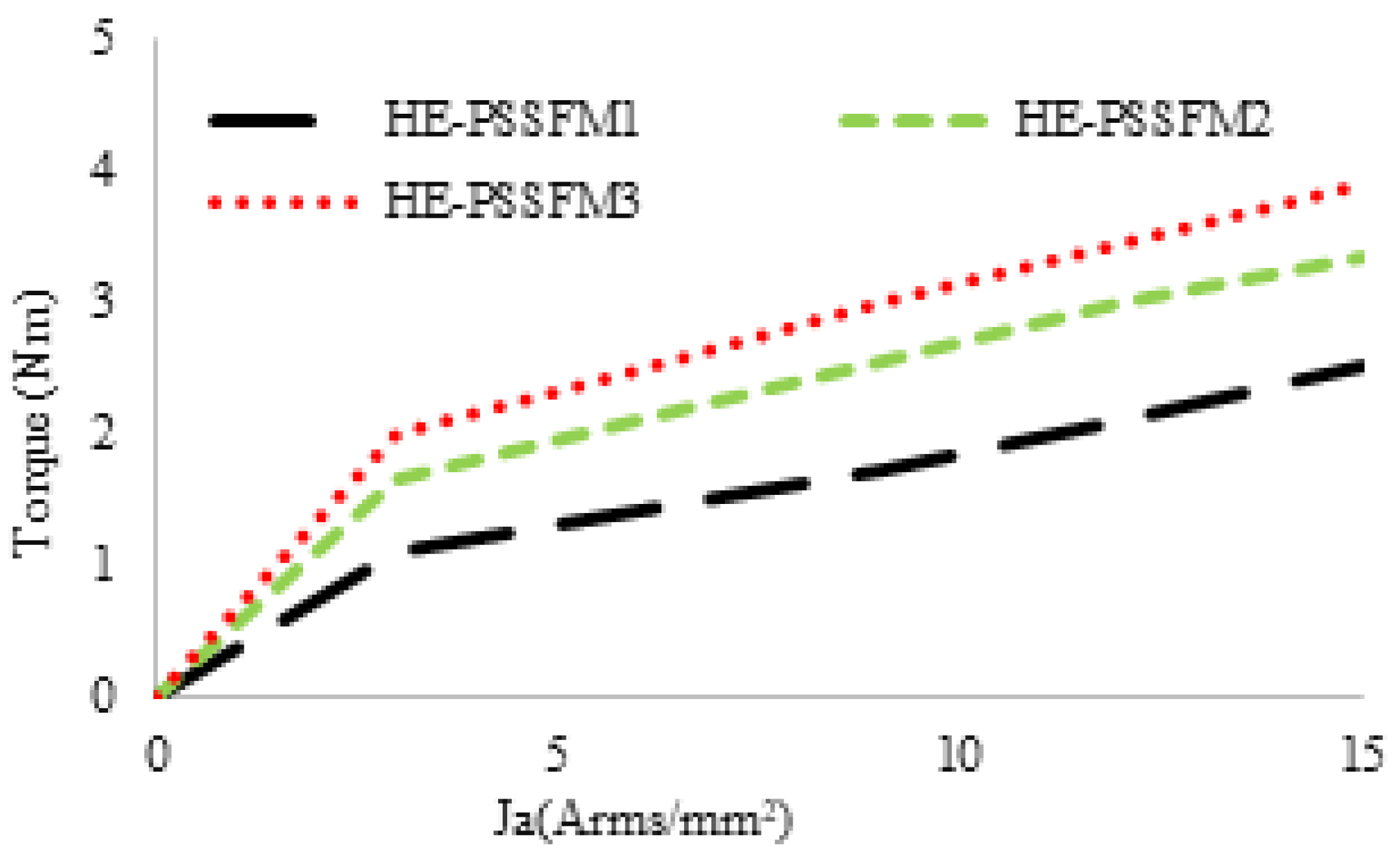
6. Torque Comparing with HE-PSSFM1 and HE-PSSFM2 Machine
Effigy 22, the average torque of proposed blueprint, in compression with the HE-PSSFM1 and HE-PSSFM2 varies by irresolute the armature current density (
) while keeping field current density (
) abiding. Information technology is observed that electromagnetic torque is improved with an increase in
, and achieved an optimal torque of 3.89 Nm for HE-PSSFM3. The torque increases linearly which shows that there is no flux counterfoil and saturation. The HE-PSSFM3 car average electromagnetic torque is 35% and thirteen% greater than HE-PSSFM1 and HE-PSSFM2 machines, respectively.
7. Stress Analysis
The rotor stress analysis is very of import for high-speed machines. It is identifying the optimal rotor tensile strength at dissimilar speeds. Beyond the maximum stress, the rotor structure breaks. Rotor stress analysis is a technique to place the chief stress, nodal strength and displacement occurring in the rotor structure in an ideal state after load is applied. Generally, the status for mechanical stress of the rotor structure is accomplished by centrifugal forcefulness due to the longitudinal rotation of rotor. Additionally, centrifugal forcefulness of the rotor is greatly affected with the speed. The rotor could highly withstand the stress if the principal stress of the rotor is higher. Principal stress is a crucial result in the analysis of stress. With increasing the angular velocity of the rotor, master stress is increased exponentially. 35H210 steel is used for outer rotor HE-PSSFM3, which has a maximum tensile strength of 500 MPa. Figure 23 shows stress analysis at various speeds. At 15,000 rpm, the rotor maximum stress is 243.5 MPa, which shows that it tin rotate without any deformation at high speed.
8. Conclusions
In this piece of work, nosotros presented the design and analysis of HE-PSSFM3. This integration significantly reduced the space of the proposed design. Nosotros combine the partitioned stator design and dual stator pattern. The field winding and permanent magnet are housed in the inner stator where the armature winding is placed at the outer stator. More toroidal winding is used which has a curt end connection, high torque density and is suitable for loftier-speed application. The proposed design has a improve performance in terms of flux linkage and average electromagnetic torque than the conventional machines. The permanent magnet is reduced up to 50% and thus reduced the cost of the machine. The splitting ratio between two stators is analytically optimized and validated using GA. Consequently, information technology is assumed that FEA results represented in this paper are justified. Moreover, the thermal study and belittling modeling are interesting future extensions to the proposed design.
Author Contributions
Conceptualization, M.I., North.U.R., F.1000. and F.M.; methodology, N.U.R., F.K. and A.Due south.A.; software, N.U.R., F.K. and F.G.; validation, North.U.R. and F.K.; formal analysis, N.U.R. and F.K.; investigation, N.U.R., F.K. and F.M.; data curation, N.U.R.; writing—original draft preparation, North.U.R.; writing—review and editing, F.M., A.S.A., M.I. and A.Thousand.; visualization, F.Grand.; supervision, F.Yard. and M.I.; projection assistants, F.G., M.I., A.S.A. and A.G.; funding acquisition, M.I. and A.1000. All authors take read and agreed to the published version of the manuscript.
Funding
This work was supported by the Ministry of Education and the Deanship of Scientific Research, Najran Academy. Kingdom of Saudi Arabia, under code number NU/ESCI/19/001.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Kahourzade, S.; Mahmoudi, A.; Soong, W.Fifty.; Ertugrul, N.; Pellegrino, 1000. Estimation of PM Car Efficiency Maps From Express Data. IEEE Trans. Ind. Appl. 2020, 56, 2612–2621. [Google Scholar] [CrossRef]
- Ding, H.; Liu, M.; Sarlioglu, B. Design of Conical Rotor Flux-Switching Permanent Magnet Car with Improved Flux-Weakening Capability for Traction Applications. In Proceedings of the 2019 International Aegean Conference on Electrical Machines and Power Electronics (ACEMP) & 2019 International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Istanbul, Turkey, 27–29 Baronial 2019; pp. 172–177. [Google Scholar]
- Khan, F.; Ullah, West.; Sulaiman, E. Sub-Domain Modelling and Multi-Variable Optimization of Partitioned PM Consequent Pole Flux Switching Machines. IET Electr. Power Appl. 2020, xiv, 1360–1369. [Google Scholar] [CrossRef]
- Venkataramanujam, V.; Larochelle, P.M. Design and development of planar reconfigurable motion generators. Mech. Based Des. Struct. Mach. 2016, 44, 426–439. [Google Scholar] [CrossRef]
- Hua, H.; Hua, West.; Zhao, K.; Cheng, Grand. Torque Product Mechanism of Switched Reluctance Machines with Air-gap Field Modulation Principle. IEEE Trans. Energy Convers. 2020. [Google Scholar] [CrossRef]
- Henneberger, G.; HADJI, M.J.; Ciorba, R. Pattern and test of permanent magnet synchronous motor with auxiliary excitation winding for electric vehicle awarding. In Proceedings of the European Power Electronics Chapter Symposium, Lausanne, Switzerland, 19–xx October 1994. [Google Scholar]
- Fodorean, D.; Djerdir, A.; Viorel, I.A.; Miraoui, A. A double excited synchronous car for direct drive application—Pattern and paradigm tests. IEEE Trans. Free energy Convers. 2007, 22, 656–665. [Google Scholar] [CrossRef]
- Laldin, O.; Sudhoff, South.D.; Pekarek, S. Analysis and design of hybrid machines for DC generation. IEEE Trans. Energy Convers. 2015, 30, 1192–1199. [Google Scholar] [CrossRef]
- Di Barba, P.; Bonislawski, M.; Palka, R.; Paplicki, P.; Wardach, K. Pattern of hybrid excited synchronous machine for electrical vehicles. IEEE Trans. Magn. 2015, 51, 1–vi. [Google Scholar] [CrossRef]
- Amara, Y.; Vido, Fifty.; Gabsi, M.; Hoang, E.; Ahmed, A.H.B.; Lecrivain, M. Hybrid excitation synchronous machines: Free energy-efficient solution for vehicles propulsion. IEEE Trans. Veh. Technol. 2008, 58, 2137–2149. [Google Scholar] [CrossRef]
- Zhang, Z.; Yan, Y.; Yang, S.; Bo, Z. Principle of operation and characteristic investigation of a new topology of hybrid excitation synchronous machine. IEEE Trans. Magn. 2008, 44, 2174–2180. [Google Scholar] [CrossRef]
- Zhang, Z.; Ma, Due south.; Dai, J.; Yan, Y. Investigation of hybrid excitation synchronous machines with centric auxiliary air-gaps and not-compatible air-gaps. IEEE Trans. Ind. Appl. 2013, fifty, 1729–1737. [Google Scholar] [CrossRef]
- Khan, F.; Sulaiman, E.; Ahmad, Chiliad.Z. A novel wound field flux switching motorcar with salient pole rotor and nonoverlapping windings. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 950–964. [Google Scholar] [CrossRef]
- Khan, F.; Sulaiman, E. Design optimization and efficiency analysis of 12slot-10pole wound field flux switching car. In Proceedings of the 2015 IEEE International Magnetics Conference (INTERMAG), Beijing, Cathay, 11–fifteen May 2015; p. 1. [Google Scholar]
- Shah, F.M.; Maqsood, South.; Shah, Z.Grand.; Muhammad, F.; Kim, South. Multilevel LVDC Distribution System with Voltage Unbalancing and Disturbance Rejection Control Topology. IEEE Admission 2020, 8, 133787–133801. [Google Scholar] [CrossRef]
- Tong, M.; Cheng, M.; Hua, W.; Ding, Due south. A Single-Stage On-Board Two-Stage Integrated Battery Charger for EVs Based on a Five-Stage Hybrid-Excitation Flux-Switching Machine. IEEE Trans. Veh. Technol. 2020, 69, 3793–3804. [Google Scholar] [CrossRef]
- Ur Rahman, L.; Khan, F.; Khan, One thousand.A.; Ahmad, N.; Khan, H.A.; Shahzad, M.; Ali, S.; Ali, H. Modular Rotor Unmarried Stage Field Excited Flux Switching Machine with Not-Overlapped Windings. Energies 2019, 12, 1576. [Google Scholar] [CrossRef]
- Owen, R.L.; Zhu, Z.; Jewell, Yard.Westward. Hybrid-excited flux-switching permanent-magnet machines with fe flux bridges. IEEE Trans. Magn. 2010, 46, 1726–1729. [Google Scholar] [CrossRef]
- Hua, H.; Zhu, Z.; Zhan, H. Novel consequent-pole hybrid excited machine with separated excitation stator. IEEE Trans. Ind. Electron. 2016, 63, 4718–4728. [Google Scholar] [CrossRef]
- Hua, H.; Zhu, Z. Novel partitioned stator hybrid excited switched flux machines. IEEE Trans. Free energy Convers. 2017, 32, 495–504. [Google Scholar] [CrossRef]
- Khan, F.; Sulaiman, E.; Ahmad, M.Z. Review of switched flux wound-field machines engineering. IETE Tech. Rev. 2017, 34, 343–352. [Google Scholar] [CrossRef]
- Eger, T.; Bol, T.; Thanu, A.; Daróczy, L.; Janiga, Chiliad.; Schroth, R.; Thévenin, D. Application of Entropy Generation to Better Oestrus Transfer of Heat Sinks in Electric Machines. Entropy 2017, 19, 255. [Google Scholar] [CrossRef]
- Farrell, R.E.; Kongthon, J. The foursquare root rule—A case written report of a scaling factor for machines with dynamic similitude. Mech. Based Des. Struct. Mach. 2019, 1–18. [Google Scholar] [CrossRef]
Figure 1. Structure view of different designs of winding configuration.
Figure one. Structure view of different designs of winding configuration.
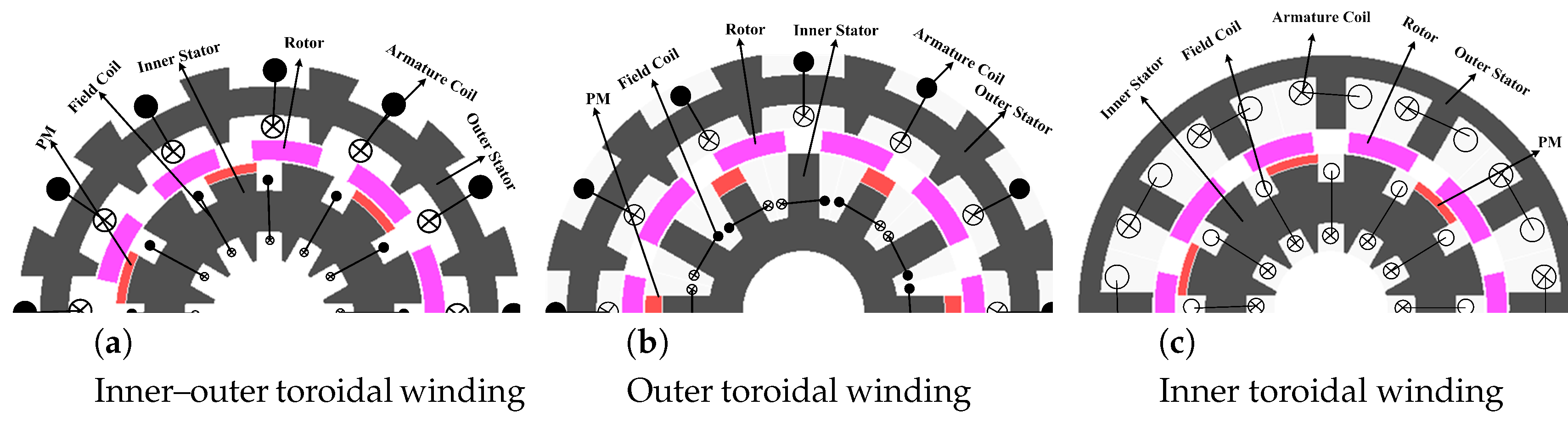
Figure ii. Proposed blueprint HE-PSSFM3 and conventional designs i.e., HE-PSSFM1 and HE-PSSFM2.
Figure 2. Proposed design HE-PSSFM3 and conventional designs i.e., HE-PSSFM1 and HE-PSSFM2.
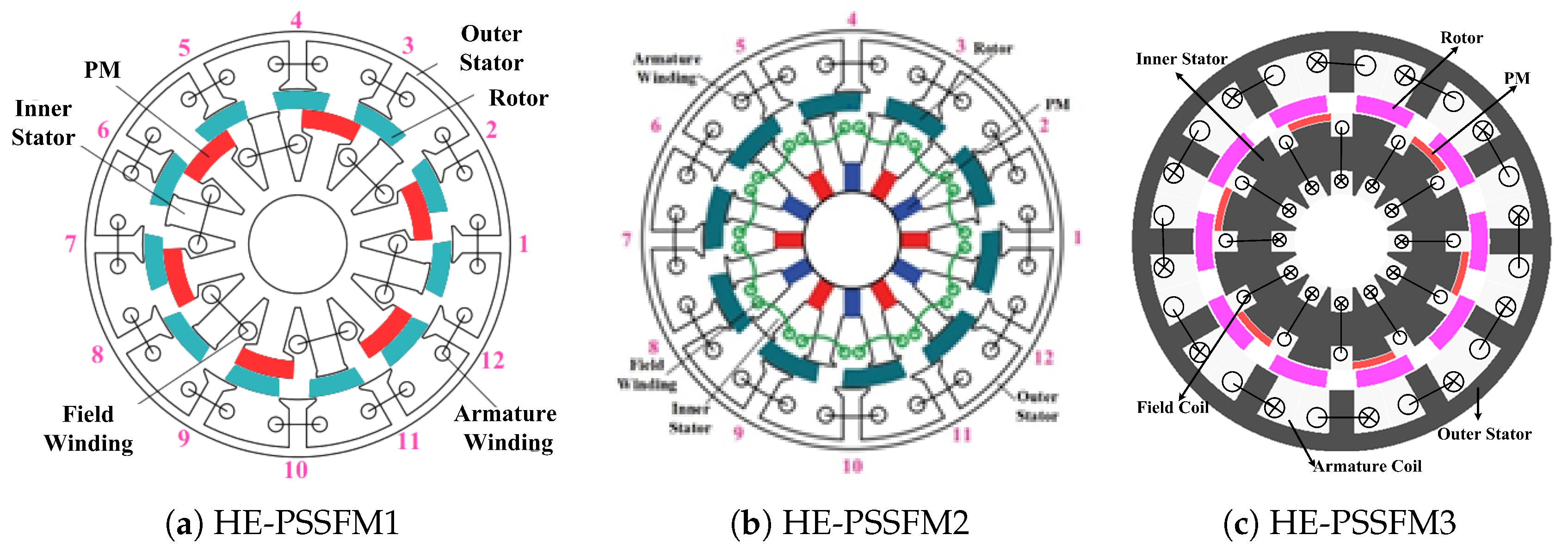
Figure 3. Flux distribution at unlike rotor positions by PM excitation only. (a) Electrical caste,
,
. (b) Electric degree,
,
.
Figure 3. Flux distribution at dissimilar rotor positions by PM excitation only. (a) Electrical degree,
,
. (b) Electrical caste,
,
.

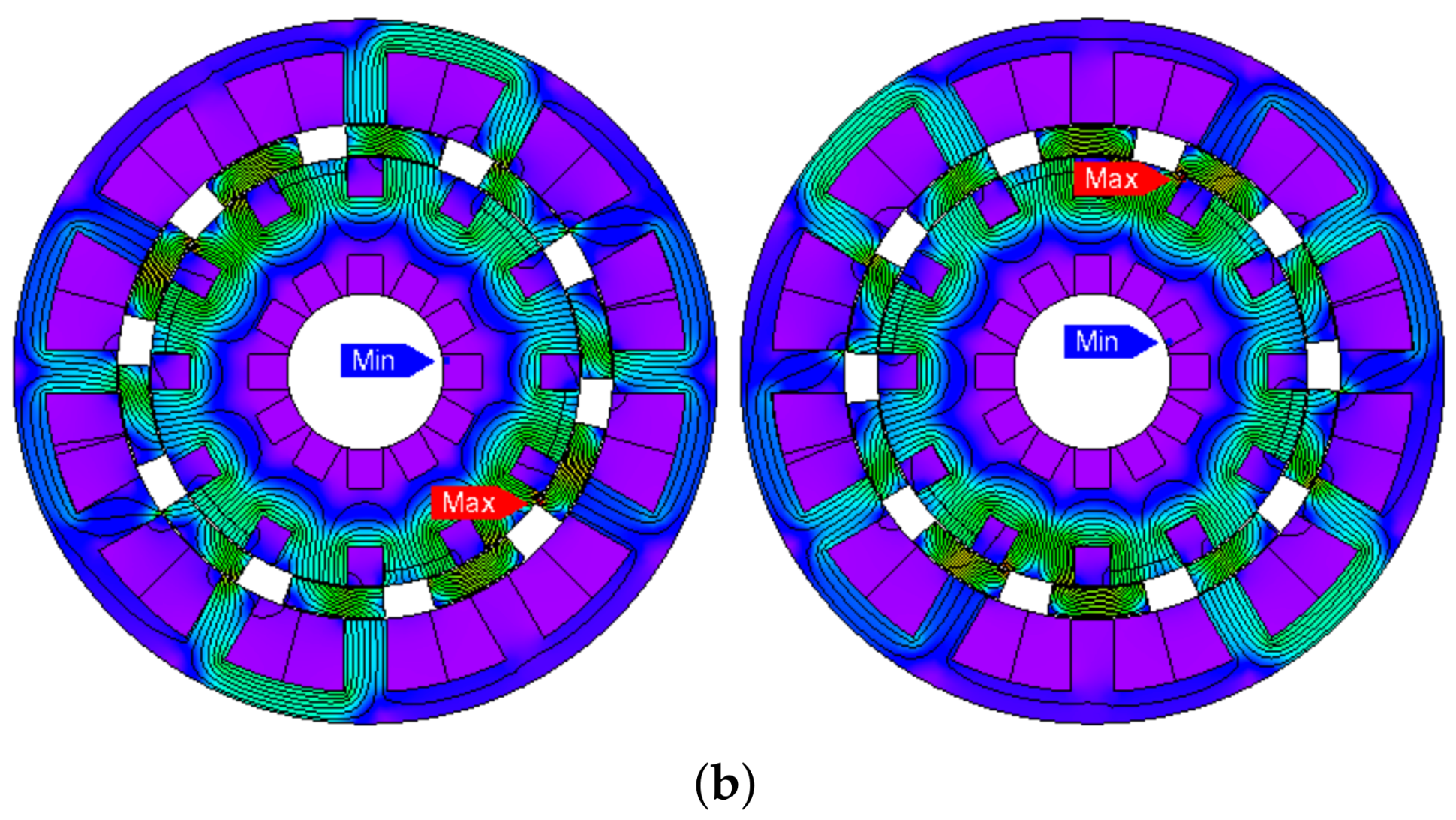
Figure iv. PM excitation only.
Effigy 4. PM excitation only.
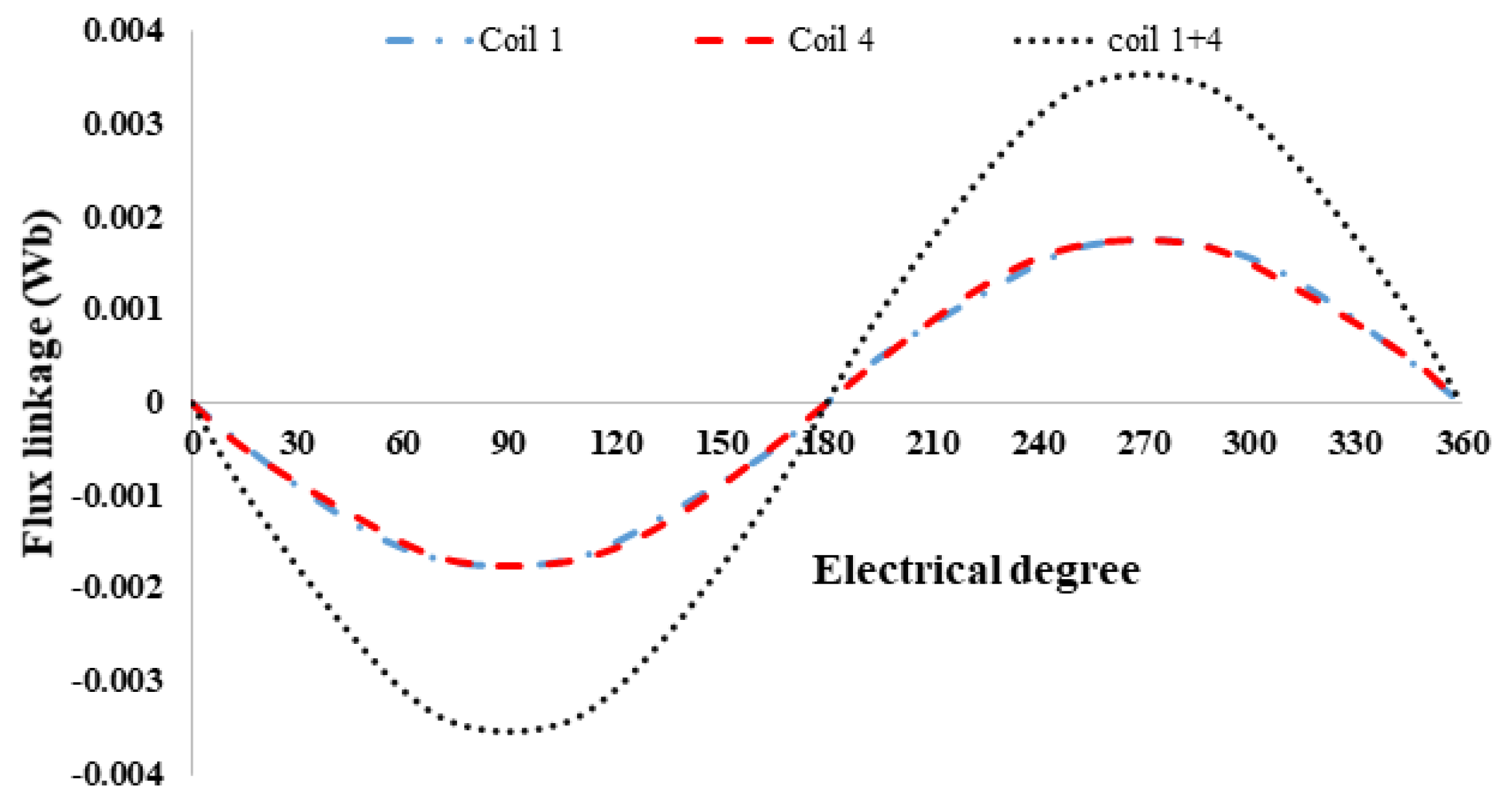
Figure 5. Paths of flux enhancing and flux weakening.
Effigy five. Paths of flux enhancing and flux weakening.
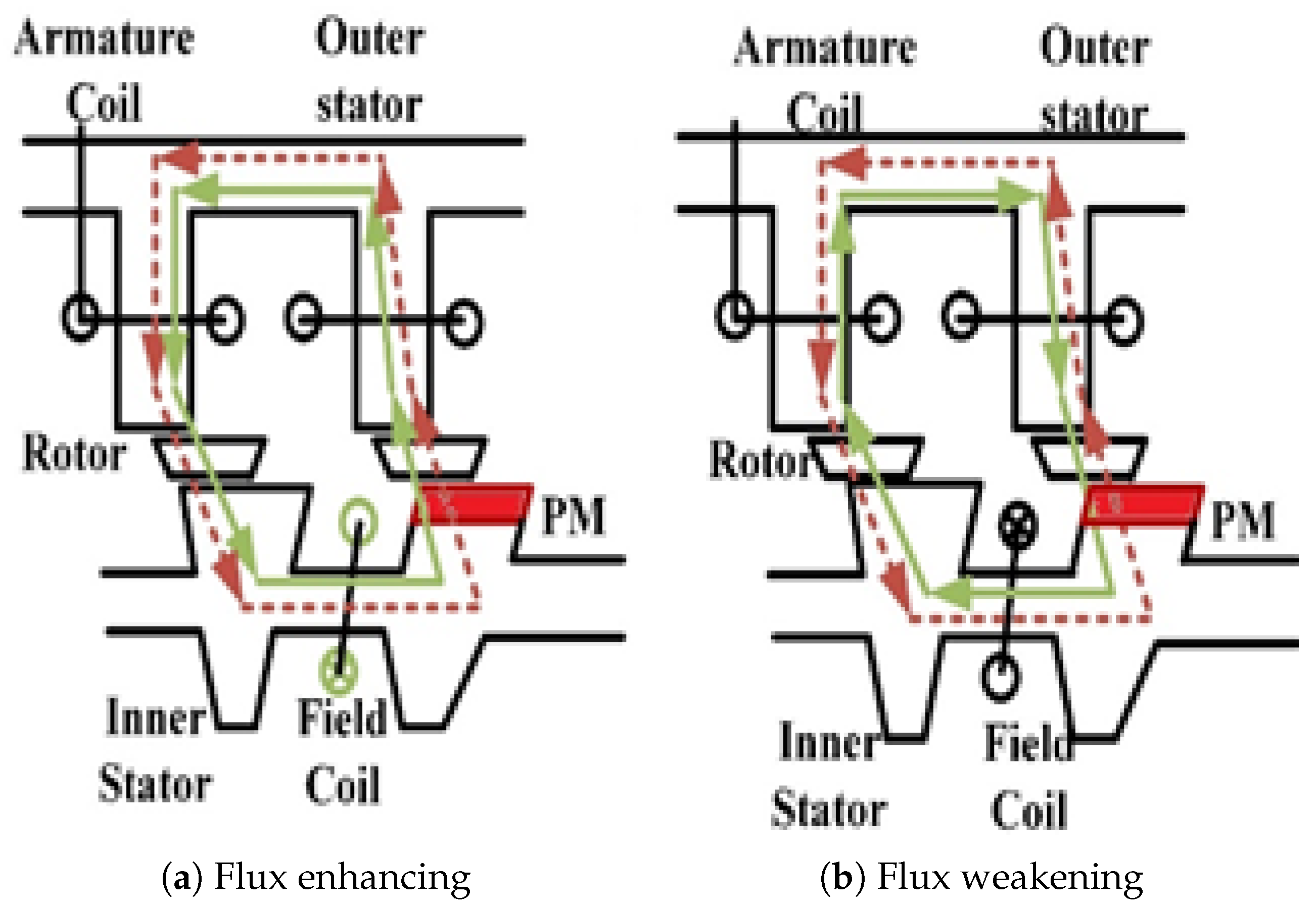
Figure 6. Flux distribution at no load/cooling jacket of inner stator HE-PSSFM3; (a) flux enhancing, (b) flux enhancing and (c) cooling jacket of inner stator HE-PSSFM3.
Figure 6. Flux distribution at no load/cooling jacket of inner stator HE-PSSFM3; (a) flux enhancing, (b) flux enhancing and (c) cooling jacket of inner stator HE-PSSFM3.
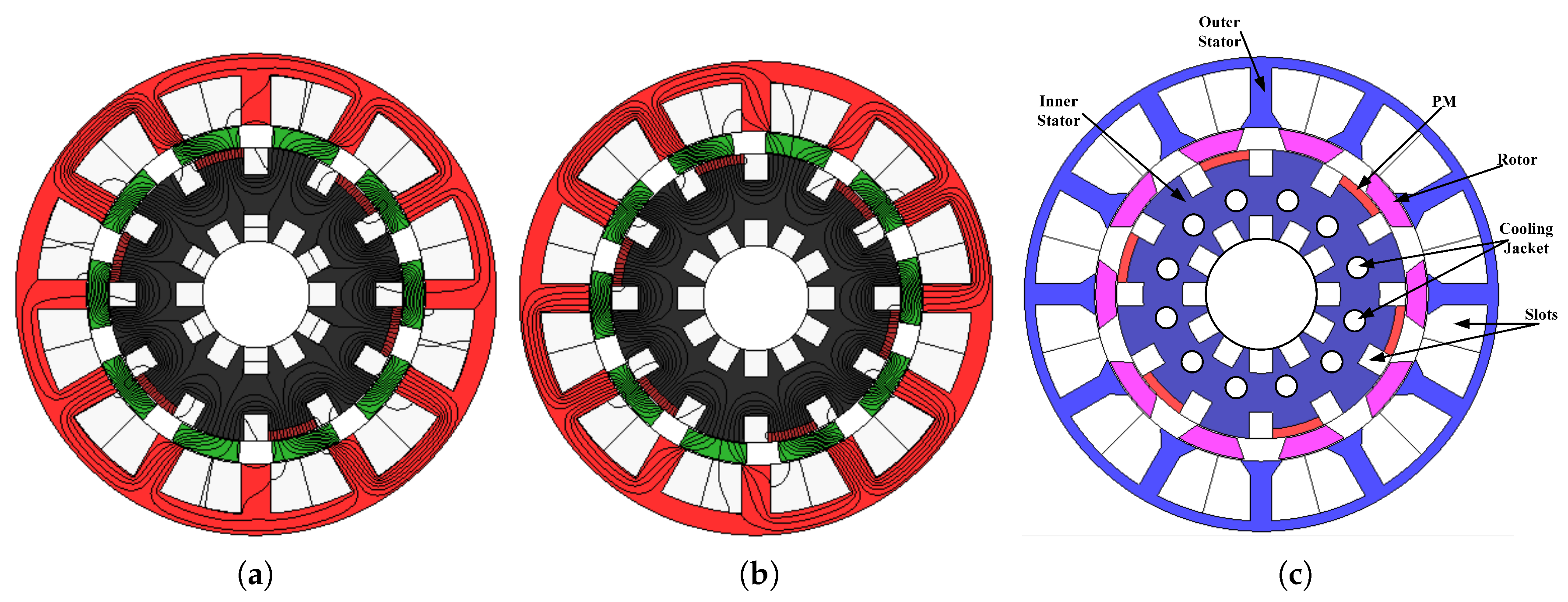
Figure 7. Flux linkage/flux density plots at unlike rotor position; (a) flux linkage with combined excitation, and (b) flux density plots at different rotor position.
Figure seven. Flux linkage/flux density plots at different rotor position; (a) flux linkage with combined excitation, and (b) flux density plots at different rotor position.
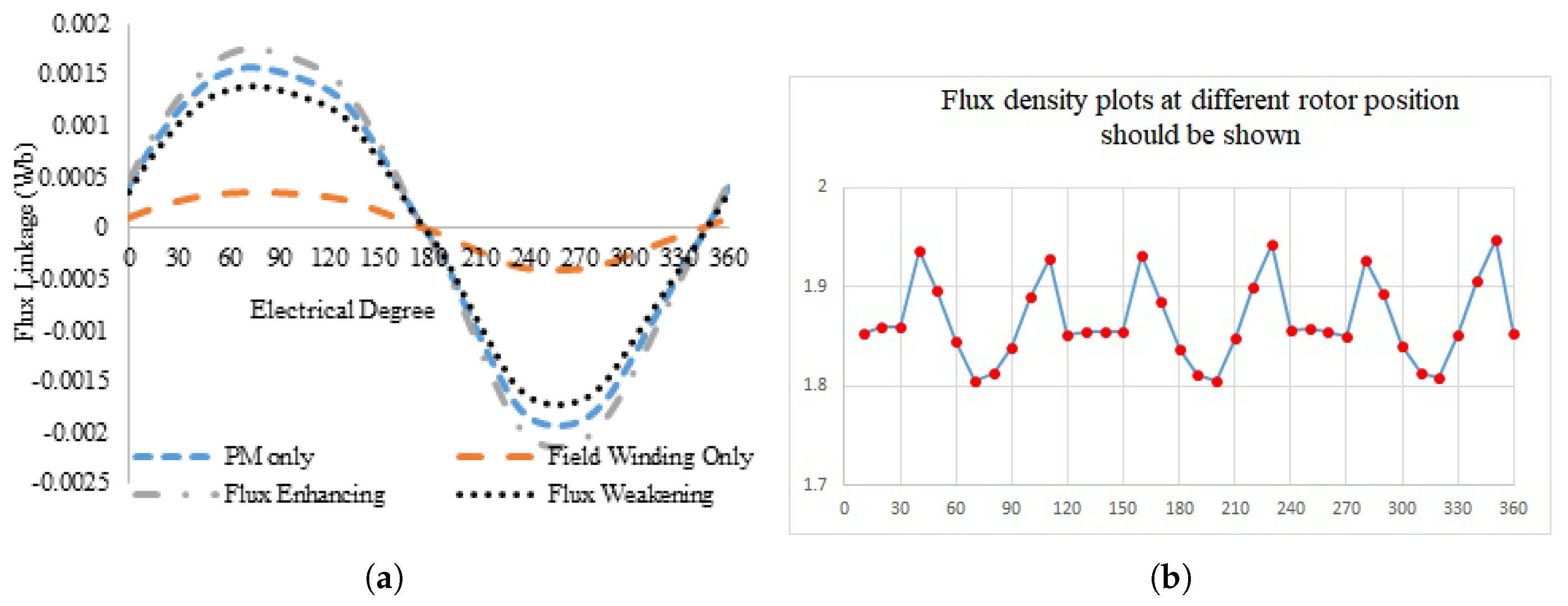
Figure 8. Dorsum EMFs at 400 rpm without field excitation.
Figure 8. Back EMFs at 400 rpm without field excitation.

Figure 9. Cogging torque without field excitation.
Effigy 9. Cogging torque without field excitation.
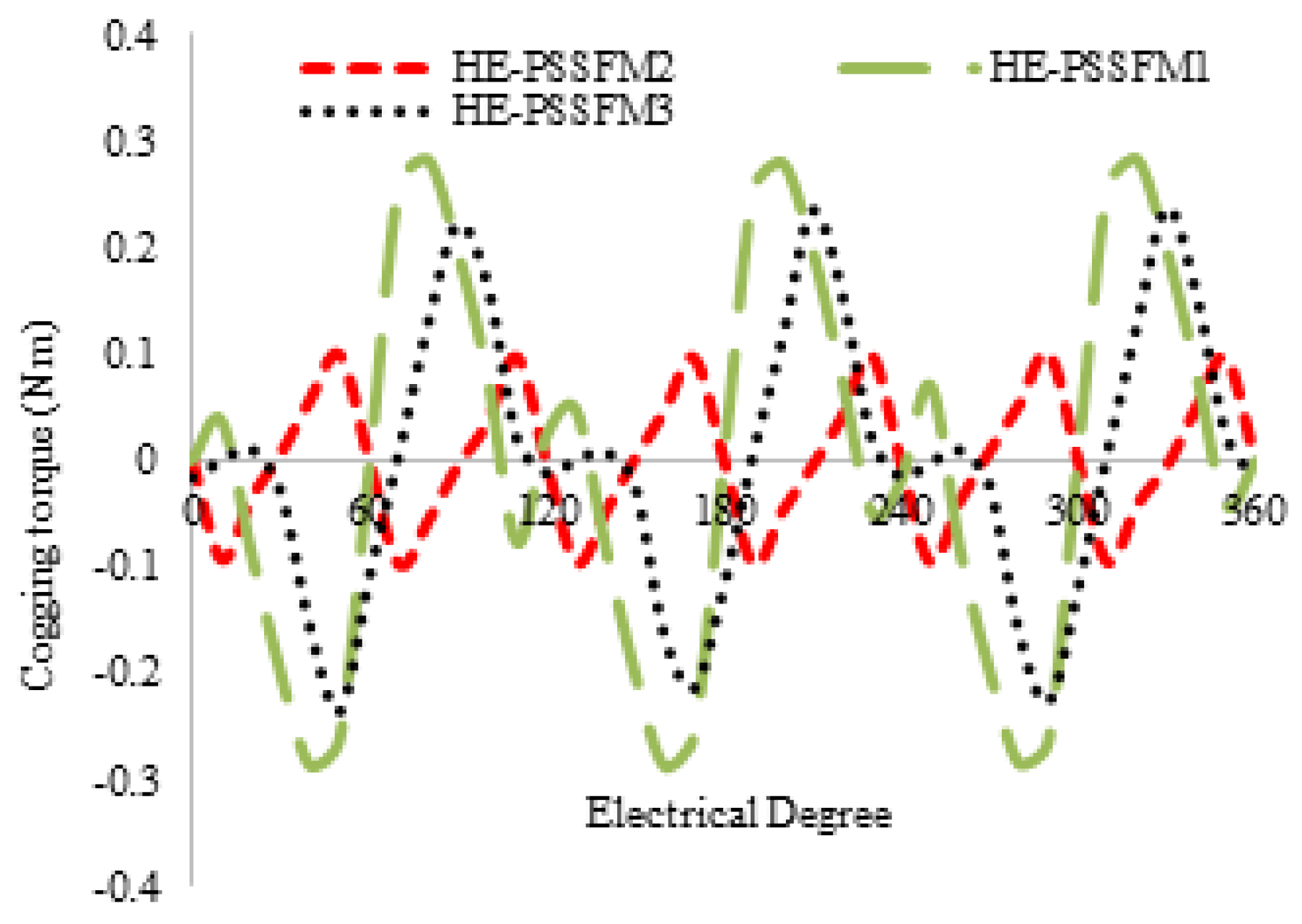
Figure 10. Back EMF waveform at 400 rpm with various field excitation.
Figure ten. Back EMF waveform at 400 rpm with diverse field excitation.
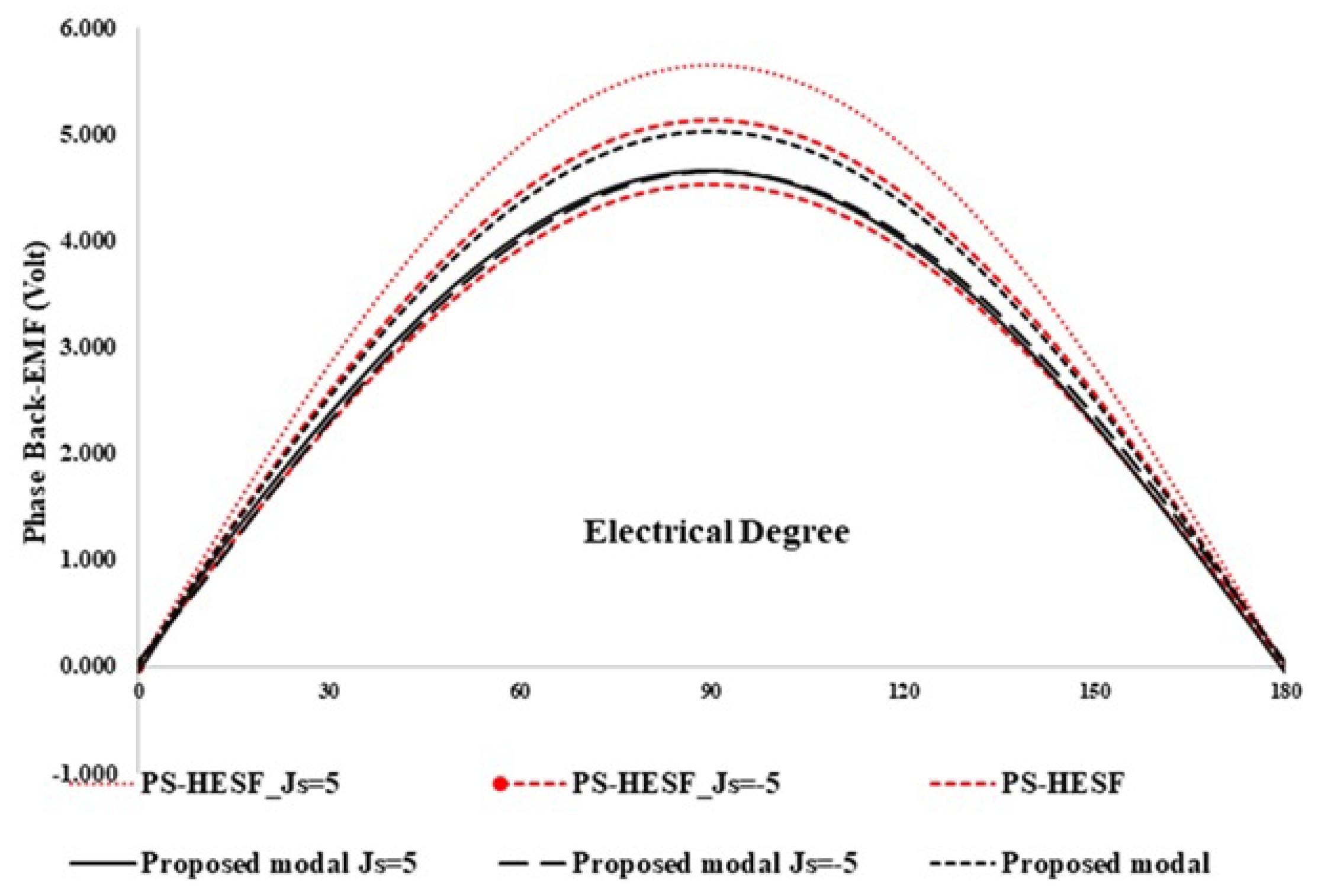
Figure eleven. Variations of peak primal back EMF.
Figure 11. Variations of pinnacle fundamental back EMF.
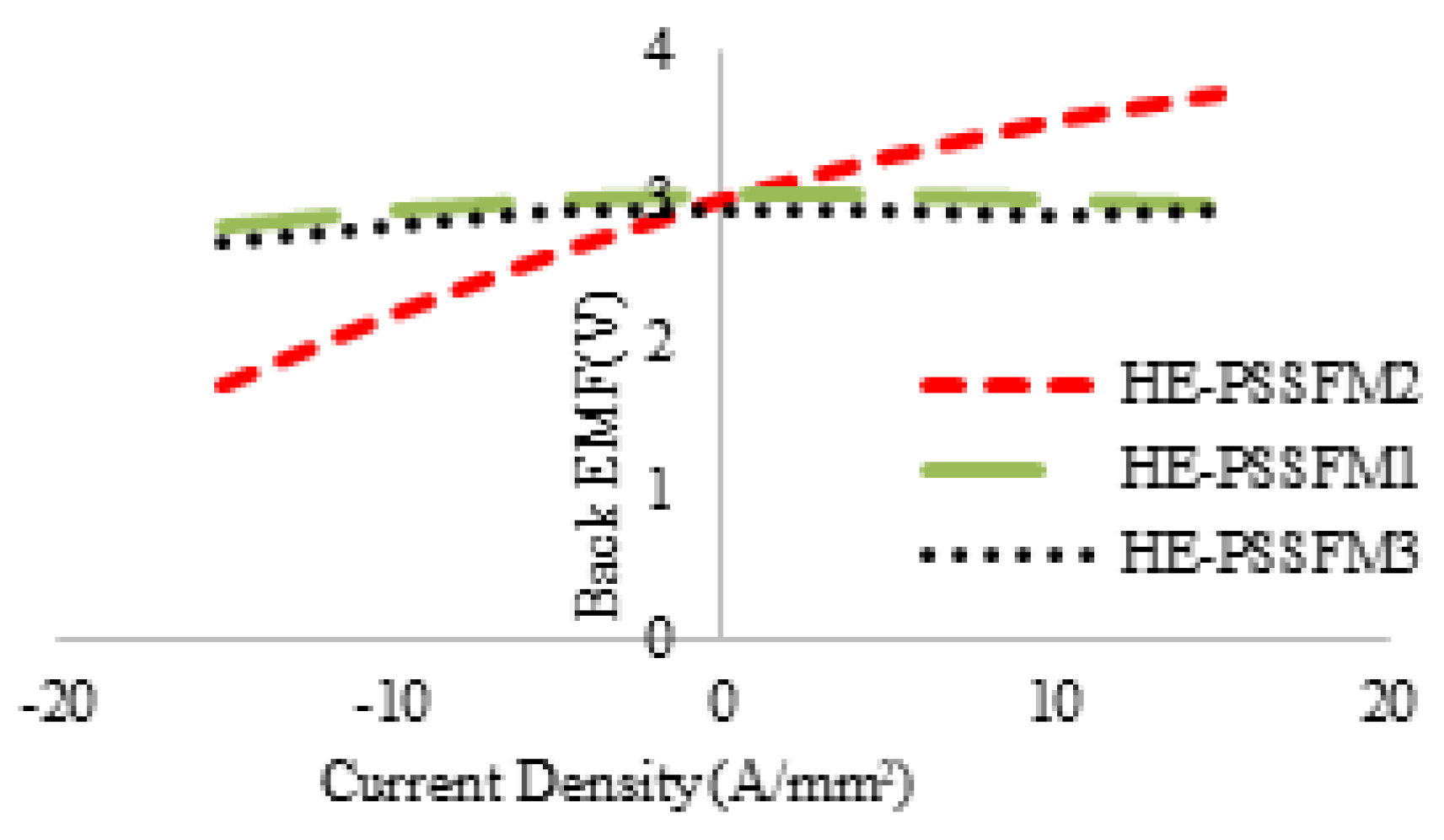
Figure 12. Torque waveforms with various field excitations (20 West copper losses).
Figure 12. Torque waveforms with various field excitations (20 W copper losses).
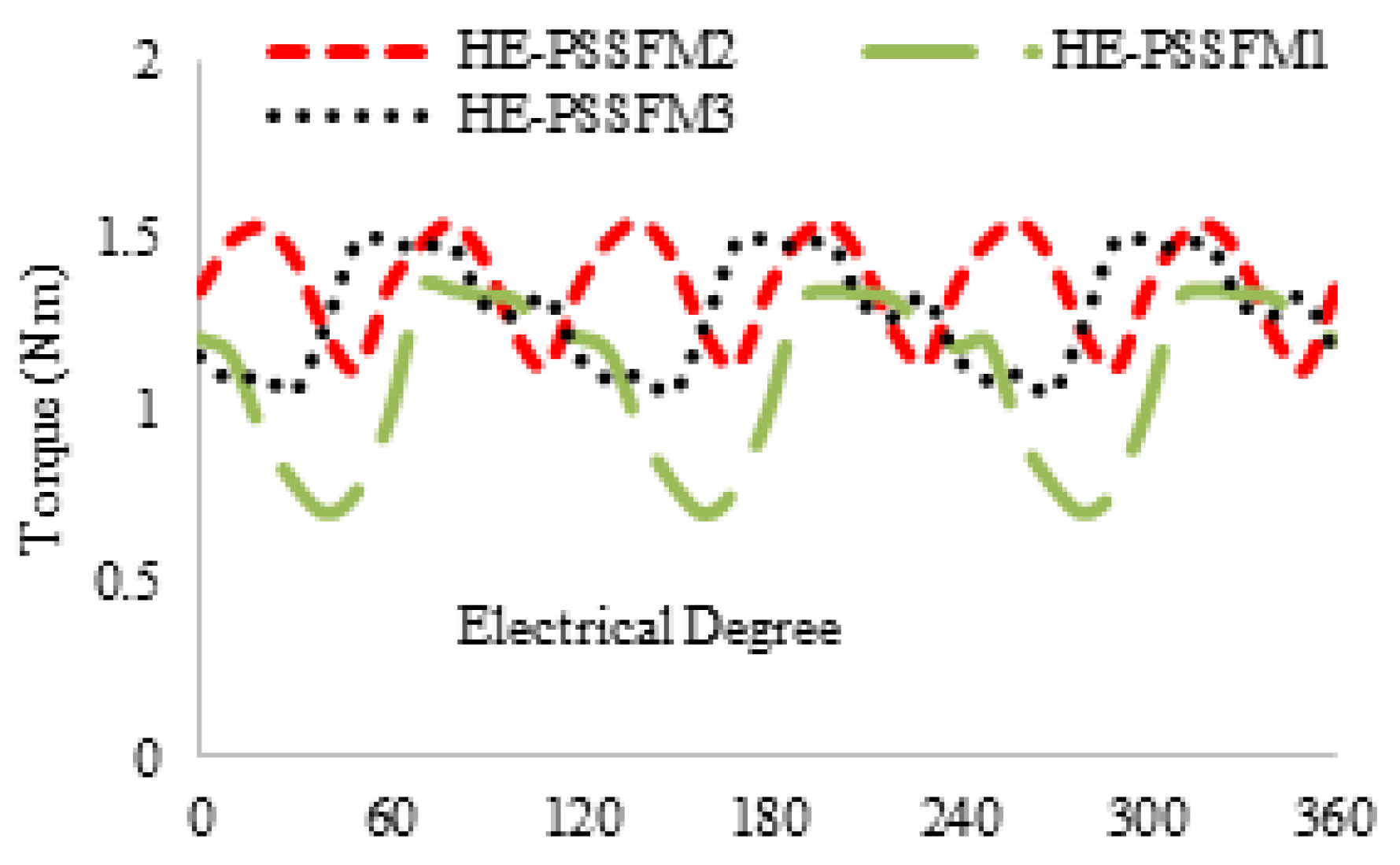
Figure thirteen. Design parameters in HE-PSSFM3.
Figure 13. Design parameters in HE-PSSFM3.

Figure 14. Variation of normalized torque with
: Comparison between belittling and FEA predictions.
Figure 14. Variation of normalized torque with
: Comparison between analytical and FEA predictions.

Figure 15. Geometric parameter/optimized design of HE-PSSFM3.
Figure 15. Geometric parameter/optimized design of HE-PSSFM3.
Effigy 16. 3D sketch/mechanical assembly of HE-PSSFM3; (a) 3D sketch, and (b) mechanical associates.
Figure 16. 3D sketch/mechanical associates of HE-PSSFM3; (a) 3D sketch, and (b) mechanical assembly.

Figure 17. No-load flux linkage at PM excitation merely; (a) flux linkage of initial and designs, and (b) flux linkage of 2d and 3D design.
Figure 17. No-load flux linkage at PM excitation merely; (a) flux linkage of initial and designs, and (b) flux linkage of second and 3D design.
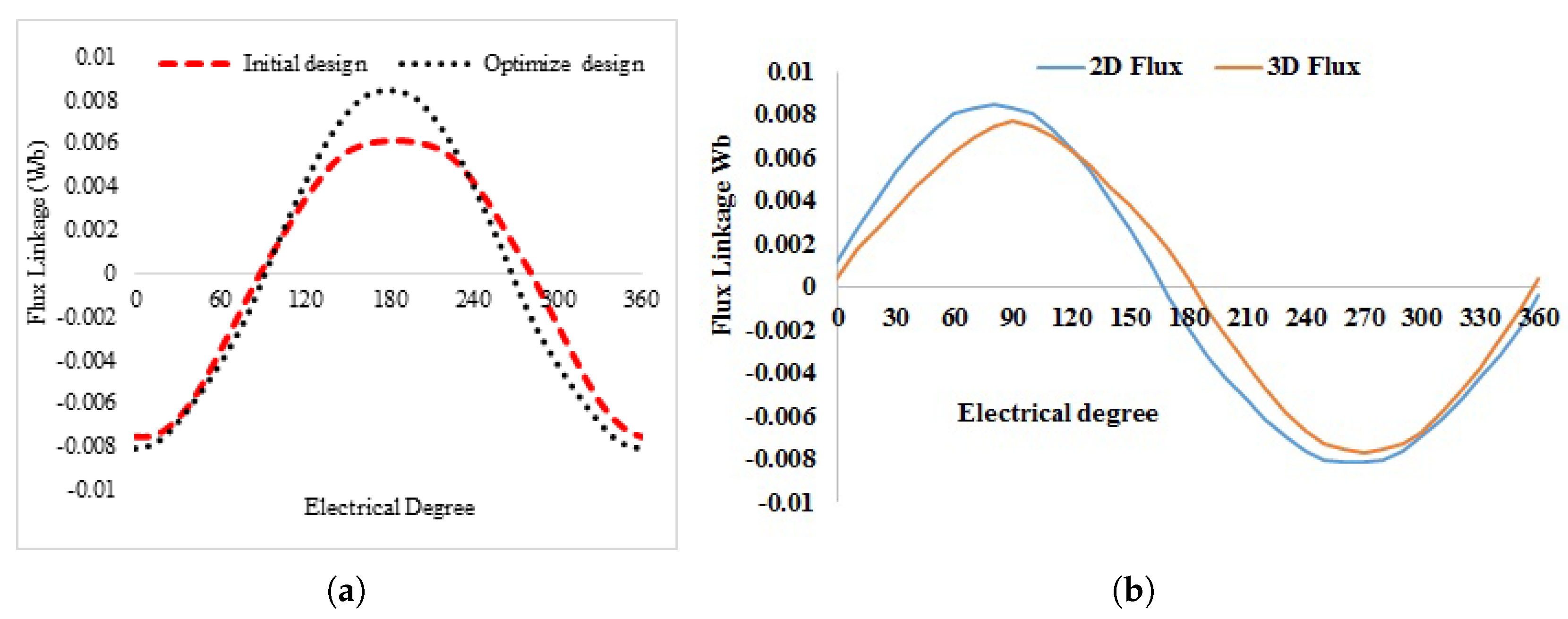
Figure xviii. Torque waveforms with different field excitations.
Figure eighteen. Torque waveforms with different field excitations.

Figure 19. Cogging torque without field current of initial and optimized blueprint.
Figure 19. Cogging torque without field current of initial and optimized blueprint.
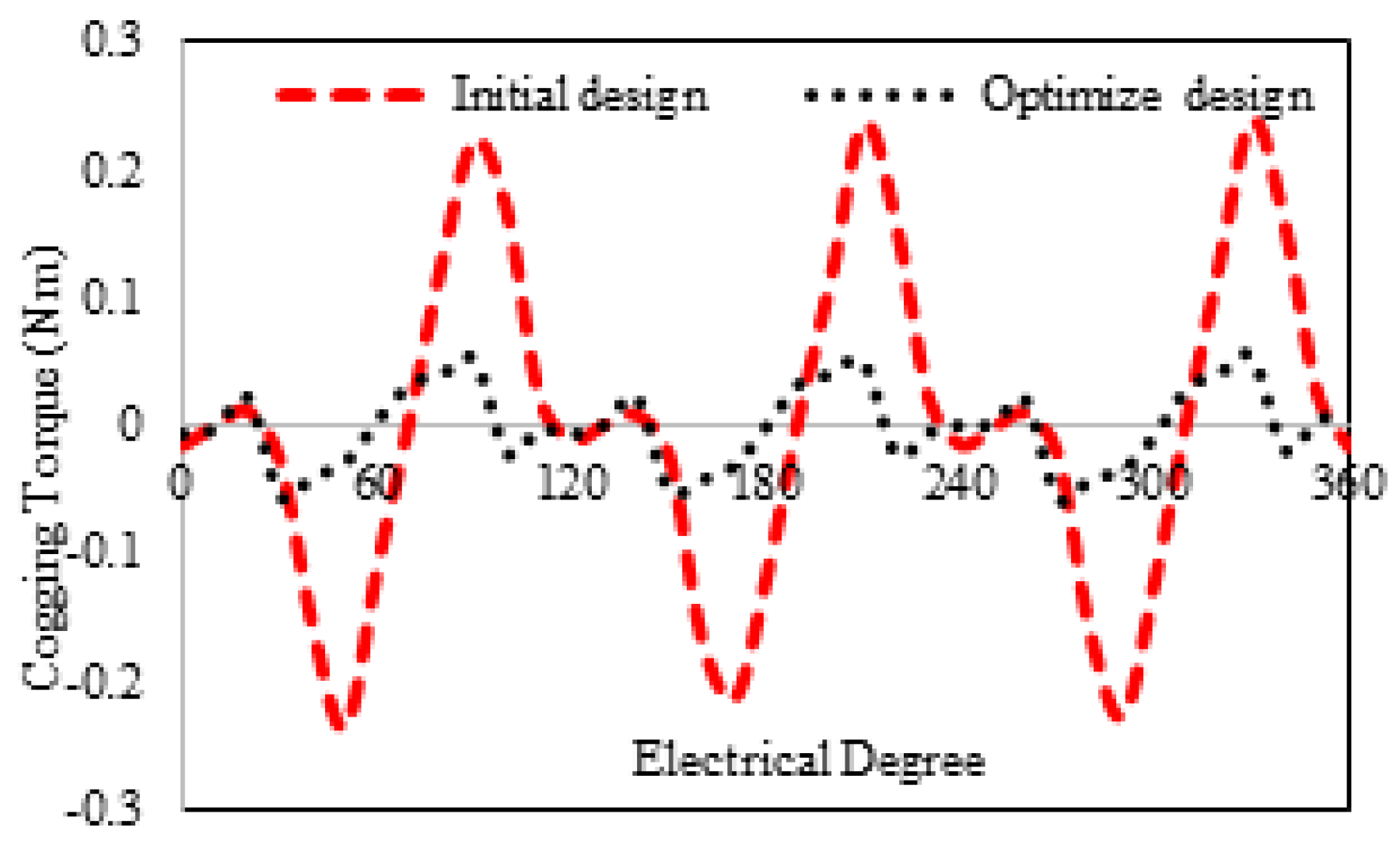
Figure twenty. Copper losses at diverse current density.
Effigy 20. Copper losses at various current density.
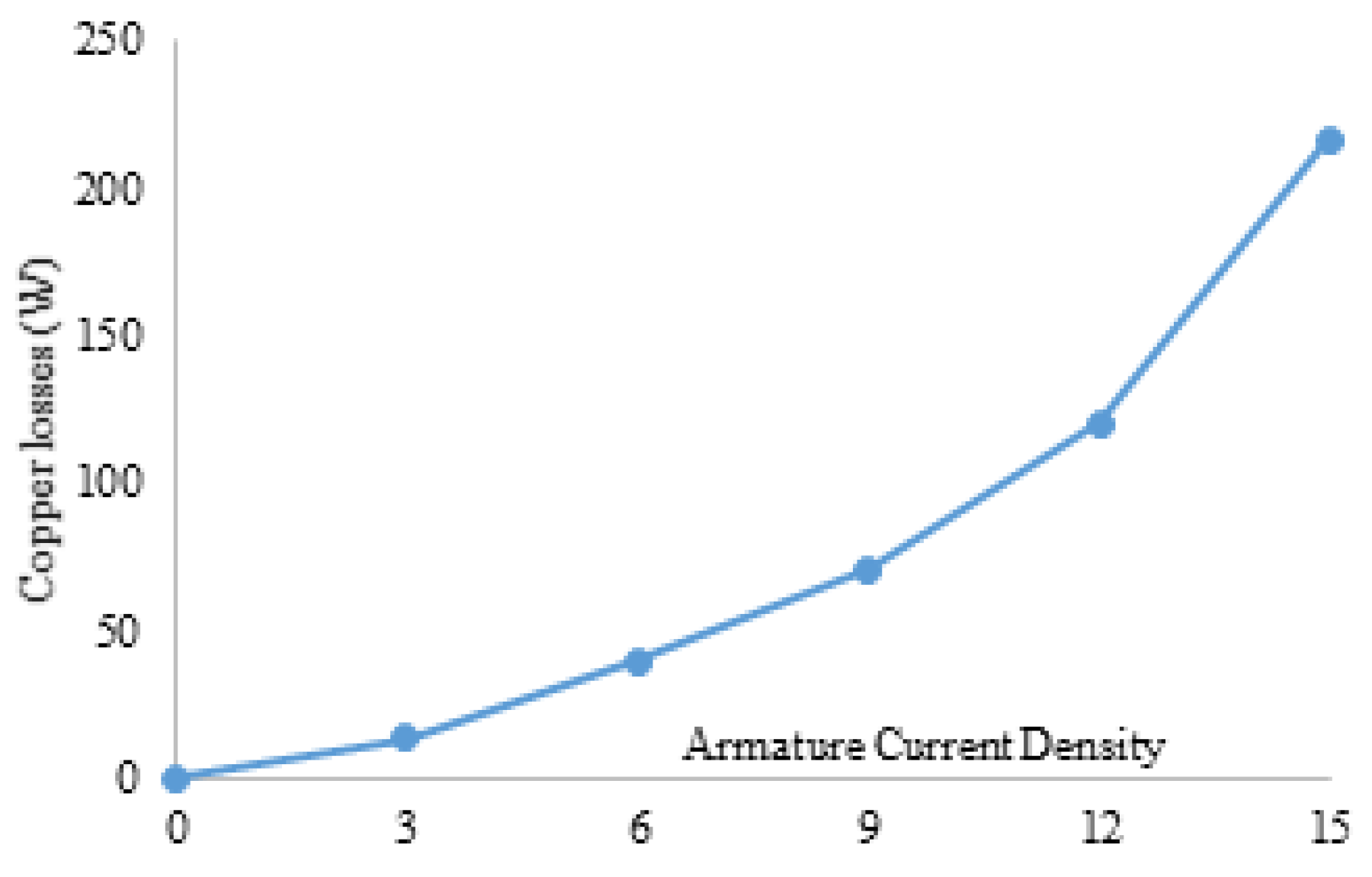
Figure 21. Stack length versus torque.
Figure 21. Stack length versus torque.
Effigy 22. Torque versus armature electric current densities.
Figure 22. Torque versus armature current densities.
Effigy 23. Stress verses speed.
Figure 23. Stress verses speed.

Tabular array one. Comparisons of dissimilar winding configurations.
Tabular array ane. Comparisons of dissimilar winding configurations.
| Feature | Unit | Different Winding Configuration | ||
|---|---|---|---|---|
| Inner Toroidal | Outer Toroidal | Inner and Outer Toroidal | ||
| Cogging torque | mNm | 438.5 | 683.iv | 484.1 |
| Flux linkage | mWb | 12.four | 5.ane | 4.3 |
| Boilerplate torque | mNm | 1287.25 | 560 | 250 |
Table 2. Design parameters and their values in the conventional and proposed models.
Tabular array two. Blueprint parameters and their values in the conventional and proposed models.
| Parameter | HE-PSSFM3 | HE-PSSFM2 | HE-PSSFM1 |
|---|---|---|---|
| Stator slot number | 12 | 12 | 12 |
| PM summit (mm) | 1.67 | five.6 | 5.six |
| Slot packet factor | 0.v | 0.5 | 0.five |
| PM thickness (mm) | ten | 3 | iii |
| PM volume (mm) | 2500 | 5000 | 2500 |
| Rotor pole-pair number | 10 | 10 | 10 |
| Inner radius of outer stator (mm) | 31.95 | 31.95 | 31.95 |
| Rotor inner pole arc | 24 | 24 | 24 |
| Inner stator inner radius (mm) | x.four | 10.iv | x.4 |
| Rotor thickness (mm) | 3.five | 3.5 | three.5 |
| Rated speed (rpm) | 400 | 400 | 400 |
| Inner stator outer radius (mm) | 27.45 | 27.45 | 27.45 |
| Air-gap length (mm) | 0.five | 0.v | 0.five |
| Active axial length (mm) | 25 | 25 | 25 |
| Inner stator yoke radius | 7.v | 16.5 | xvi.5 |
| Outer radius stator (mm) | 45 | 45 | 45 |
Table 3. Motorcar torque characteristics.
Table three. Machine torque characteristics.
| HE-PSSFM3 | HE-PSSFM1 | HE-PSSFM2 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Field Winding | Unit | 0 | Js = −5 | Js = 5 | 0 | Js = 5 | Js= −5 | 0 | Js = 5 | Js= −5 |
| Tavg | Nm | 1.29 | i.25 | one.34 | 1.0 | 1.12 | 0.87 | 1.08 | 1.28 | 1.0012 |
Table 4. Parameters of initial and final design.
Table 4. Parameters of initial and final design.
| Parameter | Unit | Initial Blueprint | Optimize Pattern |
|---|---|---|---|
| Stator slot number | Non be | 12 | 12 |
| PM acme | mm | 1.67 | one.67 |
| Slot package factor | Not exist | 0.v | 0.v |
| PM thickness | Mm | 10 | 10 |
| PM volume | mm | 2500 | 2500 |
| Stator yoke radius | mm | 43 | 41 |
| Active centric length | mm | 25 | 25 |
| Rotor inner pole arc | deg. | 24 | 16.5 |
| Rated speed | r/min | 400 | 400 |
| Rotor outer pole arc | deg. | 25 | 24 |
| Rotor radial thickness | mm | 3.5 | 3.5 |
| Inner stator outer radius | mm | 27.45 | 27.45 |
| Inner stator inner radius | mm | 10.4 | x.4 |
| Rotor pole-pair number | Not exist | 10 | 10 |
| Outer Stator inner radius | mm | 31.95 | 31.95 |
| Air-gap length | mm | 0.v | 0.5 |
| Stator outer radius | mm | 45 | 45 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This commodity is an open up access article distributed under the terms and weather condition of the Artistic Commons Attribution (CC By) license (http://creativecommons.org/licenses/by/4.0/).
Source: https://www.mdpi.com/1099-4300/22/9/920/htm
{kind=link}
Post a Comment for "Changed Staror"